梯度密度柱自動控制方案
方案1:
設計目的:1.使每次密度柱的試驗組别之間幹擾變小。
2.更便于觀察。
3.使每次密度柱中的可試驗組别數量增加。內就
設計設想:將(jiāng)原原每根密度柱中的打撈部分離城取消,改為柱内清理。
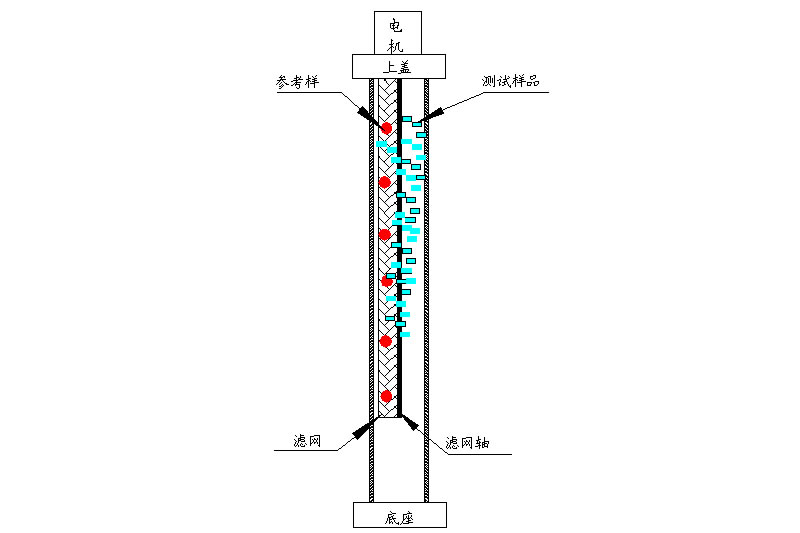
設計結構:如圖一

圖二:俯視密度柱
樣(yàng)品分布情況
原理說(shuō)明:
將(jiāng)柱内立體圓柱空間分布按功能(néng)進(jìn)行劃分身冷,將(jiāng)參考樣(yà紅村ng)布置于柱内左側後(hòu)女呢方,將(jiāng)測試過(guò)的過(guò)期年那樣(yàng)品有系統自動在每次清理後(hòu)推至柱後(hòu)側區域,讀內而柱正面(miàn)全部留給當前有效樣(yàng)品使用。
上蓋設計有過(guò)濾網控制裝置。按照每30銀吃分鐘移動180度的速度,將(jiāng)測試區域内的樣(yàng)品清理至過煙友(guò)期樣(yàng)區域。完成(ch數輛éng)後(hòu),恢複至原位。
按照設計理念,理論上來說(shuō)基本可以不進動關(jìn)行打撈操作。而且組别之間的幹擾大大減小。便服照于觀察。此結構將(jiāng)為方案2做硬件基礎。自廠
方案2:
設計目的:1
設計設想:在方案1的基礎上增加視覺處理,視覺分析。
設計結構:如 圖三
圖三 側視圖
視覺采用彩色高清130萬像素工業視覺系統,冷物視覺檢測區間大約120mm*120mm,視覺面(miàn)積14400mm車白2,這(zhè)樣(yàng),這(zhè)樣(yàng),基本可可有以知道(dào)大約30像素/mm,也就(jiù)是說(shuō),最小分辨率醫分大概在0.3mm的樣(yàng)子。
3組密度柱采用1個相機處理,相機的旋轉支架安裝于密度柱外底盤之上問還。當試驗時(shí),自動進(jì問農n)行水平移動,到達3個固定的照相位置。
當視覺取出位置信号後(hòu),送上位機(計算機)處理。小機上位機程序主要完成(chéng見如)分析及出具報告。這(zhè)在得得後(hòu)續進(jìn)行協商。








 備案号:
備案号:
